
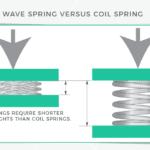
Wave springs are core to myriad gear, actuator, clutch, and consumer-grade motion assemblies. They are load bearing — included in designs to address play or compensate for dimensional variations. Wave springs apply load in axially — so are specified by working height (and other parameters). All springs are either for applying load in tension, compression, […]
FAQs + basics
What are common modes of industrial clutch and brake engagement?
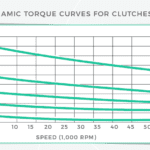
Key parameters dictate which clutches and brakes are suitable for a given application: The first parameter is the mode of motion and whether the axis needs a brake or clutch. Clutches generally bridge moving machine sections to shape relative motion, while brakes’ main job is to stop and hold rotating elements. Several design variations exist, […]
Four laws of electromagnetism that you should know
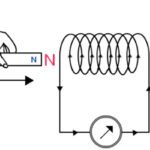
The operation of electric motors is governed by various laws of electricity and magnetism, including Faraday’s law of induction, Ampère’s circuital law, Lenz’ law, and the Lorentz force. The first two – Faraday’s law and Ampère’s circuital law – are included in Maxwell’s equations. Together with Lenz’ law and the Lorentz force, these principles form […]
What are integrated motor-drive combinations?

Updated November 2019 ⚙️ Assembling a traditional servo system necessitates the wiring together of a separate motor, encoder, amplifier, and controller. In contrast, integrated motors are sometimes classified as plug-and-play motion components — as they can usually be setup out of the box with less engineering effort. The basic idea is easy to understand: Integrated […]
What is a gearbox?

Updated 2020 ⚙️ When it comes to gearing components, things can get confusing quickly. There are many terms that gear manufacturers as well as engineers and designers use to talk about what sometimes is essentially the same thing. The term “gearbox” is one of those terms, often times used interchangeably with gearhead or gear reducer […]
Encoder resolution and accuracy: What’s the difference?
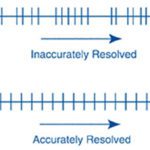
Encoders are at the heart of any closed loop servo system, providing feedback to the controller, which uses this information to determine if the motor reached the commanded position or velocity. Thus, encoder resolution and accuracy are essential to the proper operation of a closed-loop system. Resolution is the distance over which a single encoder […]
How are encoders used for speed measurement?
The most common use for encoders is to measure angular or linear distance, but encoders can also be used to perform speed or velocity measurements. This is possible because there is a linear relationship between an encoder’s pulse frequency and its rotational velocity. In other words, as the encoder rotates faster, the pulse frequency increases […]
Do PC-based controllers do any condition monitoring?
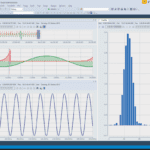
The simple answer is yes. In fact, PC-based controllers have been doing condition monitoring for many years and it is only becoming more prevalent. PC-based condition monitoring took off with the advent of falling prices of electronic computing power. As a result, PC-based condition monitoring has been getting better with improved computer technology, more powerful […]
What are overrunning clutches?

Overrunning clutches, sometimes called freewheel clutches, are used to freewheel in one direction while driving in another direction of rotation. When the driven shaft is rotating faster than the driveshaft, the clutch mechanically disconnects the driveshaft from the driven shaft. They are used in heavy-duty applications, such as agriculture, mining, aerospace, industrial metal processing, indexing, […]
How are complementary signals used to mitigate encoder noise?
Electrical noise is a common problem that occurs during the transmission of an incremental encoder’s signal to the receiving electronics, especially when the cable lengths are very long. Stray electromagnetic fields or currents induce unwanted voltages into the signal. These voltages can cause the receiver to make false counts, producing errors in the position or […]