

Hypoid gearboxes are a type of spiral bevel gearbox, with the difference that hypoid gears have axes that are non-intersecting and not parallel. In other words, the axes of hypoid gears are offset from one another. The basic geometry of the hypoid gear is hyperbolic, rather than having the conical geometry of a spiral bevel […]
FAQs + basics
Where do chain drives still make sense?

Chain drives are a tried and true method of linear actuation and are used in much industrial machinery. A typical chain drive consists of two key components; a chain and a sprocket. The chain itself is composed of several components including a pin, bushing, roller, pin link plate, and a roller link plate. The chain […]
How to address overshoot in servo control
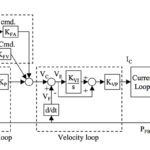
Updated August 2018 || There are three characteristics that indicate when a servo system is properly tuned: response time, settling time, and overshoot. Response time is the time it takes the system to reach a specified percentage of the target value, while settling time is the time it takes for the target value to be […]
Direct-drive motor designs: What variations are there?
The most basic definition of a direct-drive motor is a type of design that allows the motor to be connected directly to the driven load. Doing so eliminates mechanical transmission elements that tend to add compliance into a drive system such as gears, couplings, belts and pulleys, and chain drives. Direct-drive motors are sometimes also […]
Which piezo motor types experience wear?
Piezo elements are used in a variety of configurations to provide rotary or linear motion in applications that require short strokes and fast response times. Piezo elements that are used to produce motion through the inverse piezoelectric effect are known as piezo actuators. These devices provide very small displacements with extremely high resolution. When one […]
What are digital signal processors (DSPs) for motion control?

Digital signal processors (or DSPs) are dedicated ICs that can be programmed to execute specific types of calculations or algorithms. They differ from standard microprocessors in that they are not designed to do much if any of the supervisory tasks that microprocessors typically handle. This is why they can execute algorithms much faster than microprocessors […]
Hybrid linear stepper motors: Operation and applications

Like servo motors, stepper motors are available in both rotary and linear designs. When an application requires force (rather than torque) output and can operate in open loop control, a linear stepper motor is often the preferred solution. Although linear stepper motors are available in both variable reluctance and hybrid designs, the more common version is […]
For hybrid servomotors, does pole count matter?
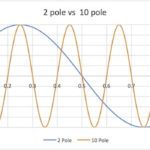
For a given rotor diameter, the number of magnetic poles on the rotor directly affects the torque available, the top speed available, and the power needed to hold a load. Higher pole counts lead to higher torque, lower top speed, and a higher motor quality factor, which is defined as Kq = T / √ […]
Why is resonant frequency important in piezo applications?
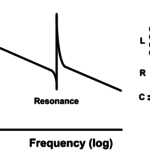
Resonance occurs when the resonant frequency (also referred to as the natural frequency) of an object or system is equal or very close to the frequency at which it is being excited. This causes the object or system to vibrate strongly and can result in unexpected – and sometimes catastrophic – behavior. When one oscillating object or system (a […]
Application: AMTI MOBIUS treadmills blend innovation and performance

MOBIUS is AMTI’s new line of high-quality performance treadmills. It comes in two models — one fixed-tilt and one inclinable, capable of a 25% gradient. Both models have two independent, 8800N-capacity force platforms, and a newly-designed frame engineered to reach the highest possible natural frequency. The result: MOBIUS treadmills are capable of the most accurate […]