

Motion controller architectures can be one of several types. Among the most common are stand-alone controllers and PC-based control. PC control for motion typically takes the form of so-called industrial PCs. These feature processors just like a typical PC but a lot of the other components are ruggedized and designed for operation in an industrial […]
FAQs + basics
Why are servo drives also called servo inverters, amplifiers, and controllers?
Let’s start with the term servo drive. Here’s what a drive does in a servo system: It basically takes an input signal from a controller and amplifies that signal which is then sent to the motor. And in that description is the key. A drive serves to amplify a signal. Amplification is needed because control […]
Lubrication for industrial design: A tutorial

In any system with moving parts, lubrication is essential. Lubrication functions to reduce friction, which dissipates heat and protects components from corrosion and wear. Lubricants are typically classified as either one of two kinds; oils or greases. Oil-based lubricants can be made from petroleum sources or newer synthetic oils. Greases have an oil base to […]
BLDC motor: Marketing jargon or more?

The term brushless dc motor (or BLDC motor) is common lingo in the industrial world. The question is, does it make any sense? Perhaps a little history can help here. The first brushless dc motors were marketed as such because they functioned as drop-in replacements for brush dc motors. There were a number of technological […]
How do switched reluctance motors differ from stepper motors?

Switched reluctance motors operate by switching currents in the stator windings in response to changes in the magnetic circuit formed by the rotor and stator. The stator of a switched reluctance motor contains windings, similar to a brushless DC motor, but the rotor is simply made of steel that is shaped into salient poles, with […]
What’s the difference between a machine automation controller (MAC) and a PAC?

Machine automation controllers (MAC) are relatively new to the industrial market. The new category of controller was introduced by Omron Industrial Automation as an expansion of the industrial controller concept, along a continuum from PLCs and PACs (programmable automation controllers) to new MACs. The main differentiating feature of a MAC versus a PAC is that […]
7 linear motion principles that electrical engineers should know

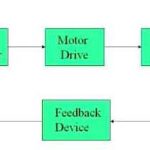
Electrical and controls engineers are normally tasked with selecting and integrating the electronic components that go into a motion control system, such as motors, drives, controls, feedback devices, and HMIs. In doing so, their primary concerns tend to be on making the various components communicate with each other, working through complex equations for drive tuning, […]
What is a knife edge conveyor?

A knife edge conveyor is a uniquely designed conveyor section used in transferring small parts between sections. The “knife edge” references the tapered, rounded end of the conveyor section. A knife edge is also called a nosebar. In practice, it often takes the form of a steel plate where one end is rounded to a […]
How notch filters and low-pass filters reduce resonance in servo systems

Servo systems experience resonance due to compliance or backlash in mechanical components such as gearboxes, screw drives, and couplings. Resonance reduces system performance, can cause audible noise, and in extreme cases can even damage hardware. Servo tuning is the process of setting controller gains to optimize servo performance, but as gains are increased, resonances typically […]
Networking for motion: Update on five realtime Ethernet-based protocols
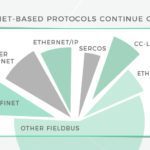
Industrial communication protocols — including traditional fieldbuses and permutations based on Industrial Ethernet — are systems of rules for messaging between automation components. Variations abound, and there’s no dominant setup with which all devices work. What is clear is that communications offering more connectivity than current-loop (4-to-20-mA) analog communications continue proliferation into even once-simple motion […]