
When we think of stiffness, we often think of mechanical stiffness — the ability of a part or system to resist deflection. But in servo-driven motion systems, stiffness can also refer to how the system is tuned — that is, how the gains in the servo controller are set and, correspondingly, how the motor responds to external disturbances.
Mechanical stiffness
Systems that are mechanically stiff resist deformation when subjected to loads. In other words, they can withstand high forces or bending moments without a change in their shape or position. (Note that the opposite of mechanical stiffness is compliance.) The mechanical stiffness of a part depends on both its modulus of elasticity and its planar moment of inertia, which is determined by the size and shape of the object.
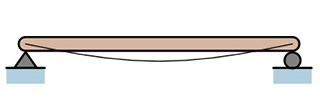
Image credit: wikipedia.org
In motion systems — such as automation or assembly equipment — the most significant influences on mechanical stiffness come from connection points between the motor and the load, including gearboxes, drive mechanisms (belt and pulley, screw, etc.), and couplings. This is one of the reasons direct drives (linear motors and torque motors) exhibit high stiffness — because the load is coupled directly to the motor, eliminating any intermediate power transmission components.
In theory, a motion system cannot be too stiff mechanically. A system with low compliance and high stiffness transmits power more efficiently and with better responsiveness than a system with low stiffness. But in real-world applications, mechanical stiffness must be balanced with damping elements to avoid transmitting shock loads and vibrations throughout the system.
Servo stiffness
In servo system tuning, stiffness — often referred to as “servo stiffness” or “control stiffness” — refers to the system’s ability to reject or overcome external disturbances. These can be disturbances that happen in a static state, when the axis is holding a position or speed, or in a dynamic state, when the axis is following a position or speed trajectory.
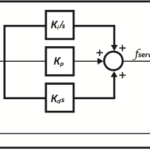
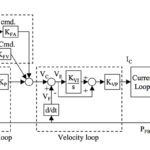
Servo stiffness is determined by the gains in the control loop. In motion control systems, it’s the position loop’s proportional gain that has the greatest influence on servo stiffness. Recall that the value of the proportional gain is directly proportional to the error being corrected and determines the amount of restoring force the motor will generate to counter disturbances.
An axis with proportional gain that is set too low cannot overcome disturbances (this is sometimes referred to as “softness” in the system), but if the proportional gain is too high, the system will tend to overshoot and oscillate around the target, causing instability.
If a velocity control loop is included, the velocity loop’s integral gain (Ki) also influences the servo stiffness.
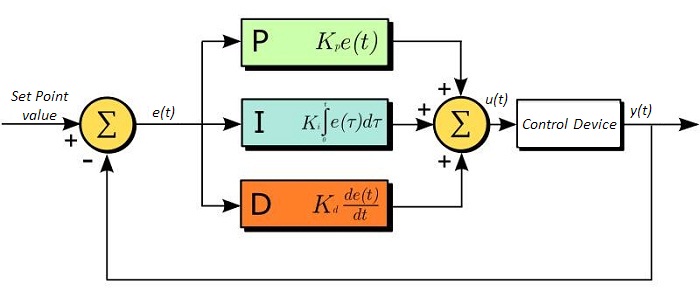
Image credit: Thorlabs, Inc.
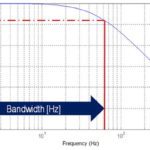
The relationship between mechanical stiffness and servo stiffness is resonance. Systems that are mechanically stiff tend to have a high resonant frequency compared to the frequency (bandwidth) at which the servo system operates. Therefore, mechanical systems with high stiffness can benefit from stiff servo tuning (high gains) — with good response, low oscillation, and fast setting time.
On the other hand, compliant mechanical systems (those with low stiffness) operate at a lower resonant frequency. If a mechanically compliant system is operated with high servo gains (high bandwidth), the servo bandwidth could approach or overlap the mechanical resonant frequency and cause the system to become unstable.


Leave a Reply
You must be logged in to post a comment.