

Applications that require complex process or motion control also require elaborate and complicated programming — often across multiple components, functions, and parameters. But thanks to the integrated develop environment found in programmable automation controllers (PACs), the programming task for these complex applications is faster, less burdensome, and more reliable. When ARC Advisory Group introduced the term “programmable […]
FAQs + basics
Quick tips: How does a servo drive connect to a motion controller?

Drives and controllers are key components in any motion system. A drive accepts commands from a motion controller and converts these signals into high current signals to drive a motor. So, how to connect a drive to a controller? Manufacturers offer a range of options for drive and controller connectivity. These typically break down into […]
What is an inching drive?

When you hear the term “inching drive,” you might think of a small actuator, possibly driven by a piezo or voice coil, suitable for short, precise movements in applications such as optical inspection. (At least, that’s what I envisioned when I first heard of an inching drive!) But inching drives are so named because of […]
What type of graphical user interface do PC-based controllers use?
Controllers that are PC-based are typically programmed via a Windows computer and used to communicate with, monitor, and control industrial machines and equipment. As the name implies, being PC-based means that the PC monitor is the main graphical user interface (GUI). One advantage of PC-based controllers is their GUI. PC-based controllers are programmed via a […]
Selecting a servo drive: 9 things you need to know

Sizing a motor for a servo application requires evaluating the move profile and torque requirements to determine the mechanical demands of the system, such as maximum velocity and acceleration, RMS and peak torque values, and load-to-motor inertia match. Once the motor is chosen, the next step is to select a drive. On the surface, selecting […]
What is non-uniform memory access in industrial controls?
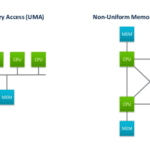
Non-uniform memory access (NUMA) is a kind of memory architecture that allows a processor faster access to contents of memory than other traditional techniques. In other words, in a NUMA architecture, a processor can access local memory much faster than non-local memory. This is because in a NUMA setup, each processor is assigned a specific […]
Stepper drives: What’s the difference between an L/R drive and a chopper drive?

There are two fundamental types of stepper drives: L/R drives and chopper drives. L/R stepper drives are also referred to as “constant voltage” drives, because they supply constant voltage to the motor windings. The current produced in the windings depends on the motor’s time constant, which is the relationship between its inductance and resistance (L/R). The […]
When to use a programmable automation controller (PAC)
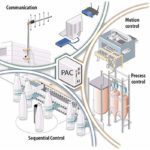
In a broad sense, a programmable automation controller (PAC) is an industrial controller that combines the functionality of a PLC with the processing capability of a PC. The term “Programmable Automation Controller” is generally accepted as having been coined by the ARC Advisory Group, which specified five characteristics that define a PAC: Multi-domain functionality A […]
What are pulses per revolution for encoders?
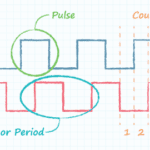
Pulses per revolution (or PPR) is a parameter associated with encoders. Basically, it is a measure of the number of pulses per full revolution or turn of the encoder, with a full revolution being 360 degrees. In essence, it is a measure of an encoder’s resolution. But what counts as a pulse may have different […]
Moments of inertia: Definitions and equations
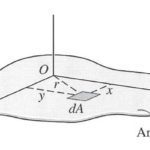
The term “moment of inertia” is often used generically, but depending on the context and application, it can refer to one of three different moments of inertia: mass, planar, or polar. In order to know which one is needed for a given calculation or analysis, it’s important to understand the differences between them and how […]