
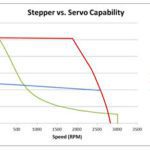
A velocity limit for a stepper motor is essentially a top speed that is set by a user beyond which the motor will not go. Why is this useful? Mainly because stepper motors have a speed where a resonant frequency is reached and may cause it to vibrate. This can cause the motor to become […]
FAQs + basics
Hysteresis loss and eddy current loss: What’s the difference?
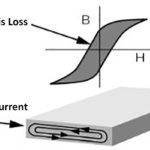
All electric motors experience rotational losses during the conversion of electrical power to mechanical power. These losses are generally categorized as magnetic losses, mechanical losses, copper losses, brush losses, or stray losses, depending on the underlying cause and mechanism. Included in the category of magnetic losses are two types — hysteresis loss and eddy current loss. […]
How to use SPI for dc motors?
Serial peripheral interface (SPI) is a commonly used input-output standard for synchronous data transmission. It transmits data between microcontrollers and peripheral devices such as sensors, memory cards, and displays, among others. At its most basic physical level, it’s a four-wire serial interface with data rates that can vary from a few MHz to upwards of […]
Servo motor torque curves: What you need to know
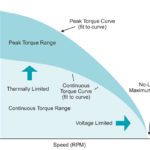
Updated November 2019 || A servo motor, when coupled with a feedback device, servo amplifier, and error-correcting control loops, can maintain a tightly controlled position, torque, or speed in applications that require closed-loop operation and the ability to respond to disturbances. But another benefit of servo motors is their ability to produce significant torque over […]
How to select a network for a motion controller?
Over a range of motion control applications, there is no one-size-fits-all approach for selecting a network. However, there are several key factors to consider when deciding on the best networking option for your particular application. For starters (and perhaps most importantly), consider timing; that is, how quickly the system reacts to inputs or changes in […]
Rotary bearings: Summary of types and variations

Rotary bearings are common components in motion systems. They’re used in gearboxes, motors, pulleys, fans, pumps—virtually any time a shaft is rotating, rotary bearings are there to reduce friction and support radial or axial loads. The classification of rotary bearings begins with the type of bearing that supports the load—ball or roller. Within the ball […]
What are the signs of gearbox misalignment?
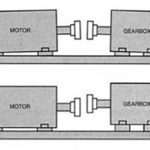
Gearbox misalignment is widely recognized as the underlying cause for the majority of gearbox repairs and failures. It can degrade machine performance, reduce mean time between repair (MTBR), and decrease the operating life of the gearbox, motor, and driven equipment. Types and causes of gearbox misalignment Proper alignment between the shaft of a gearbox and […]
Connectivity and IoT expand control design functionality (a Motion Trends report)
A recent survey of industry experts had many underscore that connectivity in manufacturing is nothing new … bu there are significant new developments in IIoT. MEET THE CONNECTIVITY and IoT EXPERTS … O’Connor • Aerotech: Connectivity in manufacturing is not a new idea — it’s been around for decades — but what is new in […]
Brakes and clutches: Top trends in IoT — and uses on ac-motor conveyors and servodesigns

Clutches and brakes work in motion systems to stop or hold or index axes — but must do so to application specifications. No wonder then that the trend in this technology is away strictly stock parts. According to Lesli Riehemann, president at Mach III Clutch Inc., customized brakes and clutches are now 75 to 80% […]
What’s the difference between ac and dc stepper drives?
Drives for stepper motors can have inputs that are either ac or dc. What happens inside the drive is that the input signal is converted to a series of square wave pulses that are applied to the motor’s windings to power the motor and produce motion. However, stepper motors themselves function as ac motors (they […]