

By Kazuki Into, Circuit Development Manager • Oriental Motor USA Corp. || Because stepper motors run and then stop at each step angle, they deliver high-accuracy position control. But the way they incrementally advance causes vibration and noise. Now, some drivers use advanced electronics to track and control current into motors as a way to achieve smooth […]
Drives + Supplies
FAQ: What is V/Hz control mode for AC drives?
AC motors are commonly paired with variable frequency drives (VFDs), which control motor speed by regulating the frequency of the supplied voltage. Depending on the application and level of speed regulation required, VFDs can be controlled by either scalar or vector methods. The most common type of VFD control is a scalar method referred to as volts […]
Motion controllers help planes take precision aerial photos of disasters

Quick response to catastrophes such as floods and fires is critical, but disaster sites are often inaccessible and unsafe for inspectors and adjusters who come after first responders. Now Pictometry, an EagleView company, collects and supplies ultra-clear aerial photography to let insurance carriers, restoration companies, utilities, and contractors identify safe-access points, areas of total loss, […]
IDEC’s New Power Supplies Replace Existing Models

IDEC Corporation announces the PS5R-V line of DIN-rail power supplies, completely replacing their existing PS5R and PS5R-S series with more efficient, compact and cost competitive models. These power supplies are specifically designed for use in demanding industrial applications and improve upon existing models in many areas. The PS5R-V line of power supplies includes 7.5W, 10W, […]
CANopen Lexium Motion Module

The recently released Lexium Motion Module (LMM), an ultra-compact programmable motion controller, expands its performance range with the release of a new CANopen version. The product’s full featured CANopen interface supports CiA DS301: CANopen Application Layer/Communication Profile and DSP402: Device Profile for Drives/Motion Control. For CANopen motion systems with tight space constraints, the LMM’s extremely […]
C&K introduces industry’s only subminiature DP3T vertically actuated slide switch series
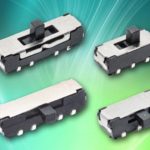
C&K Components introduced the industry’s first subminiature, vertically actuated on-on-momentary slide switch series. The new JS207 Series slide switches feature a double-pole, triple throw (DP3T) configuration that can be used to replace a two-position slide switch, and a separate momentary push switch for applications that require the on-on-mom function. In addition, the entire line of proven […]
FAQ: What are pulse and direction commands in open-loop stepper control?

When driving stepper motors open loop, there is no feedback to ensure that the motor is operating as expected. To ensure the stepper motor behaves as expected, open-loop drives use pulse and direction commands. Pulse commands are signals sent to a stepper motor by the drive. They are “pulses” of current that cause the motor […]
FAQ: How to tune servo systems for high dynamic response?
The purpose of a servo control loop is to minimize error, and this is often done through the use of PID (proportional-integral-derivative) gains, which correct errors between the target value and the actual value. But the PID algorithm is reactive, and takes time to respond. Case in point: the proportional term requires an error in order […]
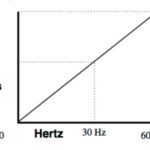
Crossover frequency: How is it used in servo motor tuning?
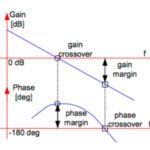
A common method for evaluating a servo system’s stability is to determine the system’s frequency response, which involves measuring the gain margin and phase margin at the crossover frequencies. To understand how gain and phase crossover frequency is used to determine stability, let’s look at exactly what it represents, using a Bode plot. Closed loop systems are difficult […]
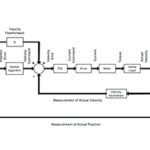
FAQ: What are servo motor current, velocity and position loops and bandwidths?
Servo motors operate in a closed-loop system, which includes a feedback device, a drive (amplifier), and a controller. The controller uses output from the feedback device to compare the commanded value (position, velocity, or torque) to the achieved value and issues commands to the drive to correct any errors. This process of monitoring feedback and […]