

ThinGap has developed the first member of a new motor family of high performance and extremely high peak torque density brushless PM motors reaching over 20 Nm/kg. The frameless LSI 105 torque motor model is 105 mm OD (4.125 in.) 25.4 mm (1.0 in.) long. Continuous torque reaches over 2 Nm (283 oz-in.) in typical […]
Featured
Why is the bandwidth of a servo control loop important?
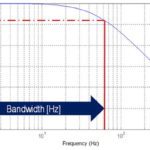
A servo drive can include any combination of three types of control loops—a position loop, a velocity loop, and a current loop. While each loop’s purpose is to control a different aspect of the motor’s performance, they are all characterized by a common parameter: bandwidth. The bandwidth, or response time, of the system is a measure […]
Motion controllers see major shifts in design thanks to IoT, online configuration, and more
We recently asked several industry experts about trends in the design and application of motion controllers to get an idea of where these precision command centers are changing approaches to design engineering. Then we published a much-abbreviated sampling of the enormous amount of insightful feedback Design World received. Below is the uncut commentary in its entirety. Enjoy […]
Trends in electric motors part two: Miniature designs on the rise for medical, mobile, and more

This is the second of a two-part series. Also read the first installment of this two-part series at Trends in electric motors 2017 part one: Market shifts towards smart solutions. Out of all industries changing motion design, medical technology is driving electric motor innovation hardest. FDA requirements on medical-device makers and their suppliers continue to include […]
Trends in electric motors part one: Market shifts towards smart solutions

This year in motor design there’s been an uptick in three trends. Disposable medical devices, new consumer products, and the automation of humbler tasks are driving demand for affordable and miniature-motor options. (Read more about motor miniaturization in the second installment of this two-part Motion Trends series on electric motors here.) A related trend towards […]
Brother Gearmotors XShip expedited delivery services from Tennessee manufacturing facility

Brother Gearmotors, a division of Brother International Corporation that offers a wide range of ultra-reliable, sub-fractional AC gearmotors and reducers for the food & beverage, packaging and material handling industries, offers expedited delivery service from its state-of-the-art manufacturing facility in Bartlett, TN. Brother Gearmotors’ U.S. manufacturing facility allows the company to meet its North American […]
Efficient 48-V 5-A hall drive from Koford for brushless motors with no minimum inductance

Koford Engineering LLC now sells a line of compact 48-V 5-A brushless motor drives. These drives are suitable for slotless or other low inductance brushless motors and require no external inductors. More after the jump. They are preprogramed and require no user set up, adjustments or programing. Unlike most drives they can operate at 100% duty […]
Motion trends third edition: Industrial clutch and brake technologies

Brakes and clutches all stop or hold or index axes on motion machinery, but they must execute those functions to application-specific parameters. Trends in this technology continue away from strictly stock parts. Case in point: Tailored power-off brakes for production automation continue to proliferate with demand for holding functions. This is to complement the ever-increasing […]
Bearing-free SIKO encoder: Redundant non-contact angle and distance measurement for mobile machines
In the field of mobile commercial vehicles, safety requirements are increasing, especially within the EU. This presents not only suppliers, but also manufacturers of vehicles, with new challenges. To make it as easy as possible for manufacturers to adapt to new requirements, the Buchenbach based firm SIKO GmbH has developed the MSK320R bearing-free rotary encoder. […]
FAQ: What’s the difference between torque constant, back EMF constant, and motor constant?
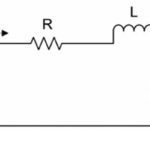
A DC motor’s output torque is directly proportional to the current through the windings, and the motor’s angular speed is directly proportional to the back EMF that it generates. These simple relationships are typically given by the equations: Where: T = torque (Nm) I = current (A) kT = torque constant (Nm/A) And Where: ω = […]