
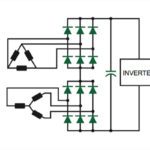
Variable frequency drives are made up of three primary sections: a rectifier, which converts the supplied AC voltage to DC; a DC bus, which stores the DC voltage; and an inverter, which converts the DC power back to AC at the voltage and frequency required by the motor. The most common, and simplest, rectifier designs use […]
Featured
PI’s award-winning fast multichannel photonics alignment engine

The FMPA Fast Multichannel Photonics Alignment Engine is an advanced alignment system based on a highly specialized digital motion controller with embedded advanced alignment and tracking functionality and a hybrid precision scanning and tracking mechanism combining the advantages of piezoelectric on servo-motorized drives. More after the jump. From motion control and nanopositioning solutions expert PI […]
New ways of controlling indexing tables for precision motion
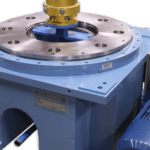
There are key differences between fixed-position indexing tables and closed-loop position indexing tables. Here we review them and how to control for maximum accuracy. By Ken Pfahl, Sales Manager | Motion Index Drives Indexing tables come in an array of versions with different speed and dwell settings to satisfy tasks in machine-tool handling, stamping, medical-device […]
FAQ: What kind of torque can I get out of a stepper motor versus other options?
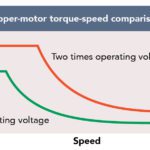
Stepper-motor output torque depends on a few things — including the stepper-motor type; how many poles it has; how fast it runs; and the type of drive supplying electrical power to the motor. For the latter, read FAQ: What is a stepper drive and how do they work? for more information. More specifically, a stepper […]
FAQ: Why do so many PC controls integrate HMIs?

By Steve Meyer || Previous generations of control relied on Cathode Ray Tubes (CRTs) for information displays as part of programming terminals. Those unfamiliar with CRTs should read the Wikipedia articles and check Google Images for representations of how the CRT works. It is an interesting part of the history of control. CRTs use high-voltage power supplies […]
FAQ: How to unify distributed I/O with PACs when building new?
By Steve Meyer || A major hardware cost in control systems is that for inputs and outputs. Devising the most suitable arrangement of I/O takes creation of an I/O map. Then grouping I/Os by location helps engineers identify packaging needed to deploy hardware correctly. One caveat: Unless one is using new breeds of design software, mapping and […]
Top 6 motion control stories of 2016

Motion control, a wide-ranging field made up of scores of components and subsystems, garners a lot of attention. We thought it would be fun to take a look back over the past year to see what readers were interested in the most. So here are the top 6 stories from MotionControlTips.com for 2016. 1. What’s […]
Applied Motion Products releases StepSERVO drives and motors with EtherCAT communications

Applied Motion Products, Inc. now offers a new series of drives and motors with EtherCAT communications. These new products utilize Applied Motion’s StepSERVO technology which combines the high torque capabilities of step motors with the closed loop dynamic control of servo systems. The result is a motor and drive solution that operates more quietly and efficiently, […]
FAQ: Why are DC motor armature cores made of laminations?

DC motors are constructed with two major parts: the rotor and the stator. The rotor has a ring-shaped iron core with slots that hold coils, or windings. Following Farady’s law, when the core is rotated in a magnetic field, a voltage, or EMF, is induced in the coils. This induced EMF causes current to flow, […]
Moog Animatics introduces the low-cost SL17 SmartMotor

Moog Animatics, a division of Moog Inc., has announced the release of its new, low-cost NEMA 17 SmartMotor™ model SL17406D (the SL17). Even though this motor is described as low cost, its robust design includes many of the high performance and ease-of-use features found on the high-end SM SmartMotor. More after the jump. The SL17 […]