

The answer is… it depends. For starters, it depends on one’s level of programming experience. Either past PLC programming or computer programming in general, as well as the types of programming environments (visual or textual, for instance) one is used to. Someone with a good bit of programming experience will probably find the process easier […]
FAQs + basics
FAQ: What’s the difference between torque constant, back EMF constant, and motor constant?
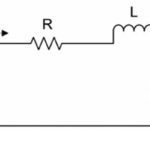
A DC motor’s output torque is directly proportional to the current through the windings, and the motor’s angular speed is directly proportional to the back EMF that it generates. These simple relationships are typically given by the equations: Where: T = torque (Nm) I = current (A) kT = torque constant (Nm/A) And Where: ω = […]
FAQ: What is the effect of ambient temperature on gearmotor rating?

Plenty of factors go into gearmotor performance. From the input power source to the right fit between the gearmotor and the application, down to environmental factors. One of the most critical is temperature; specifically, the ambient temperature. Consider an example. Suppose there are two gearmotors each with the same horsepower rating. One is rated for […]
FAQ: How are PID parameters configured for variable frequency drives?
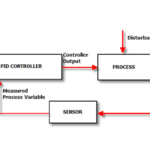
Using proportional-integral-derivative (PID) control with variable frequency drives (VFDs) is common when a process set point—such as temperature, pressure, flow, or speed—needs to be precisely controlled. In fact, many VFDs are now supplied with an integrated PID controller. PID controller terms Configuring the PID parameters for fast response and minimum overshoot (referred to as tuning […]
FAQ: What’s the difference between standard and inverter-duty gearmotors?

Standard gearmotors are designed to operate over a wide range of conditions producing a range of output speed and torque. However, there are special motor designs aimed at specific applications, such as washdown motors used in food and beverage processing or explosion-proof motors used in hazardous locations. Inverter-duty gearmotors are a bit like this. As […]
What are low voltage AC drives and why should you use them?
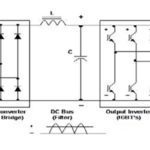
Despite the benefits of using medium voltage AC drives for high horsepower motors, low voltage technology holds a dominant place in the AC drive market, for both low- and high-power applications. There are multiple reasons for this, not the least of which are cost and availability. Medium voltage drives have historically been custom-engineered solutions, with low-volume production, […]
FAQ: What are medium voltage AC drives, and where are they used?
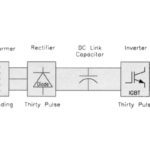
Recall that the basic equation for electric power is P = VI, or, power = voltage multiplied by current. This means that for a given power level, voltage and current are inversely proportional. In other words, the higher the supply voltage, the lower the current draw will be. For AC motors that are used in high-power applications, […]
FAQ: What’s the difference between PLCs and distributed control systems (DCS)?
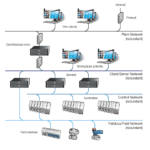
While there are differences between a programmable logic controller (PLC) and a distributed control system (DCS), there has also been a move towards greater convergence of the two technologies. But first, a little history. In the early days of automation, PLCs dominated machine control, that is, applications calling for discrete control of machine processes. Meanwhile, […]
Motion applications for dc drives
Designs based on dc drives excel in an array of industries. That’s because some applications benefit from dc drives and the distinct characteristics they offer—including simple speed control, cost-effective integration, and long life. Common dc-drive applications include the movement of axes on wire-drawing machinery, hoists and elevators, paper-web handing, extruding applications, spindle drives, and material […]
FAQ: How do direct-drive (torque) motors compare to gearmotors?

Updated May 2019 || Direct-drive motors and gearmotors are often applied to the same types of applications. Both eliminate the need for power-transmission components that unwanted add compliance between the motor and load. This includes components such as belts and pulleys, chains and sprockets, and external gearboxes. Eliminating these mechanical devices (or in the case […]