
Tolomatic’s new ACSI integrated servomotor is a space-saving, integrated servomotor/drive/controller electric actuator solution for single-axis applications. Integrating the drive/controller into the servomotor saves space on the machine by eliminating the drive box. Designed for easy-to-use, cost-effective servo control, the ACSI servo motor controller is ideal for replacing pneumatic cylinders and automating other axes of motion. […]
Servo Motors
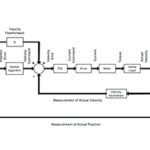
What is PIV servo control?
What is PIV servo control? It typically involves two components: feedforward control, which adds auxiliary velocity and (in some cases) acceleration signals to the servo loop in order to improve command tracking, and either PID or PIV control, which works to maximize the system’s disturbance rejection. The distinction between PID and PIV control is that […]
FAQ: How do I calculate the inertia of a servo-driven system?

Inertia, or more specifically, inertia ratio, is one of the most important factors in sizing a servo system. Inertia is defined an object’s resistance to change in velocity, and in servo-driven systems, it can be used as a measure of how well the motor is able to control the acceleration and deceleration of the load. […]
Applied Motion Products adds NEMA 34 size to StepSERVO Integrated Motors lineup

Applied Motion Products now offers NEMA 34 frame StepSERVO Integrated Motors. The addition of these larger frame sizes in the successful StepSERVO product offering represents a widening of the product range, which already included smaller frame sizes NEMA 11, 17, 23 and 24. With the larger NEMA 34 frame size, StepSERVO Integrated Motors can now […]
New cost-effective MCM servomotors from Lenze Americas

Lenze Americas has launched a series of MCM synchronous servomotors that delivers intermediate-level dynamic performance. Scalable, modular Lenze MCM motors are easy to control and optimized for a range of positioning tasks, including robotics, packaging equipment and handling systems. “Designed with an optimal torque and inertial mass ratio, our MCM servomotors give customers the precision […]
Open-loop stepper motor versus closed-loop stepper motor systems

By Jeff Kordik, CTO • Applied Motion Products Inc. || Step motor systems are a bedrock of the motion control industry. We’ll look at the differences between open-loop system vs. closed-loop system and also explain the latest developments making step motor systems even faster, quieter, and more energy efficient than ever before. Step motor systems have […]
FAQ: How to tune servo systems for high dynamic response?
The purpose of a servo control loop is to minimize error, and this is often done through the use of PID (proportional-integral-derivative) gains, which correct errors between the target value and the actual value. But the PID algorithm is reactive, and takes time to respond. Case in point: the proportional term requires an error in order […]
Crossover frequency: How is it used in servo motor tuning?
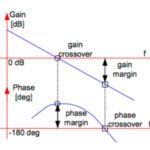
A common method for evaluating a servo system’s stability is to determine the system’s frequency response, which involves measuring the gain margin and phase margin at the crossover frequencies. To understand how gain and phase crossover frequency is used to determine stability, let’s look at exactly what it represents, using a Bode plot. Closed loop systems are difficult […]
New Lenze g500 series servo adaptor proves less means more

A global leader and manufacturer of electrical and mechanical drives, motion control and automation technologies, Lenze Americas recently released a servo adaptor for its g500 gearbox series. The compact design of the new Lenze servo adaptor provides a more compact and cost-effective solution than using a standard input flange connection from a gearbox to a […]
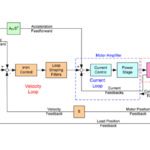
FAQ: What are servo motor current, velocity and position loops and bandwidths?
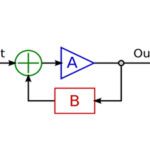
Servo motors operate in a closed-loop system, which includes a feedback device, a drive (amplifier), and a controller. The controller uses output from the feedback device to compare the commanded value (position, velocity, or torque) to the achieved value and issues commands to the drive to correct any errors. This process of monitoring feedback and […]