
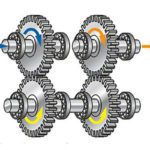
Gearboxes are commonly used in motion control applications to change the output speed and torque from a motor to a driven component. By using a smaller gear with fewer teeth (commonly referred to as a pinion) to drive a larger gear with a higher number of teeth, the torque delivered to the load is increased while […]
FAQs + basics
What is a tachogenerator and when is it used?
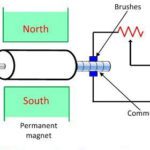
There are several ways to measure the position of a rotary axis, and some position measuring devices, such as incremental and absolute encoders, can also derive the speed of the axis by evaluating a combination of distance, time, and pulses. But for applications that require only speed measurement — without position information — a tachogenerator may […]
What are radial and axial runout and how do they affect rotary tables and stages?
Runout is a dimensional specification that defines error in the motion of a surface as it moves relative to a datum. The official geometric dimensioning and tolerancing (GD&T) definition of runout applies to the variation of a circular feature — such as a shaft or spindle — as it rotates over 360 degrees, although the term […]
How to calculate required input power for a gearmotor

The first place to start when sizing a gearmotor is to determine the required output torque and speed. But once torque and speed are defined, you’ll also want to know the required input power for the motor — particularly if the gearmotor uses an AC induction motor, where the power rating (typically given in horsepower) […]
What is AS-I Safety and what are its benefits for motion systems?
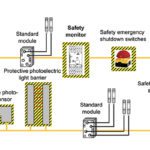
When sensors, actuators, and other lower-level components are used in a functional safety capacity, AS-Interface Safety at Work offers a simple, efficient, bus network for monitoring these safety devices — alongside standard, non-safety devices — on the AS-Interface cable. Recall that actuator-sensor interface (AS-Interface, or simply AS-I) is a master-slave bus that operates at the […]
How to calculate crossed roller bearing life (with various load types)

A crossed roller bearing is a type of rotary bearing that uses cylindrical rollers arranged in a crisscross pattern, with each roller oriented at a 90 degree angle relative to the one adjacent to it. This arrangement allows crossed roller bearings to withstand radial, axial, and moment loads, so they can often replace dual-bearing arrangements, for […]
What are the key parameters to consider when sizing and selecting a rotary actuator?
Rotary actuators — and their counterparts, rotary stages and rotary indexing tables — are designed to move loads radially with high positioning accuracy. Similar to linear actuators, sizing a rotary actuator requires evaluating parameters such as torque, speed, and inertia, as well as ensuring the actuator can meet the application requirements for positioning the load, such […]
What is field weakening and how does it affect servo motor performance?
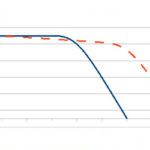
Although servo systems can very precisely control motor speed, position, and torque, in some applications, the motor may not be able to reach the commanded velocity due to limits in the available bus (supply) voltage from the drive. But advanced servo drives offer a technique referred to as field weakening, which alters the motor’s torque-speed […]
What is friction compensation in servo control?
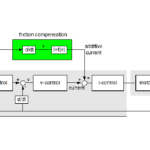
Friction, which is the resistance to relative motion between two bodies, occurs in all sliding and rolling motions. In components that use lubrication to separate rolling or sliding surfaces — such as bearings and gears — there are typically two types of friction: static friction and dynamic friction. Static friction — also referred to as “stiction” […]
What is dual-loop control for servo systems and when is it used?
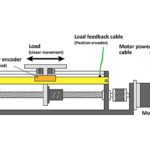
In servo-driven systems, feedback for position, velocity, and/or torque control is typically provided by a rotary encoder or resolver mounted to the motor. But mechanical components and connections in the drivetrain — such as gearboxes, ball screws, and couplings — are not perfectly rigid and introduce backlash, compliance, and windup into the system. This lack […]