
In the most common motor-driven systems, the motor is coupled to the load being moved by a mechanical transmission element — a belt, chain, rack and pinion, ball or lead screw, or even simply a gearbox. But some linear and rotary motion systems do away with mechanical transmission elements and couple the load directly to […]
What are the performance benefits of 5-phase stepper motors?
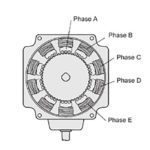
Stepper motors are often categorized by the number of phases in their construction, with 2-phase and 5-phase versions being common designs. And although 2-phase versions are more widely adopted, 5-phase stepper motors offer performance advantages that make them the preferred choice in some applications. The basic construction of a hybrid stepper motor includes two rotor […]
What are breakpoints and how are they used in motion control?

In computer programs, breakpoints are functions within the code that help with monitoring and debugging the program. The programmer can mark, or flag, a line of code as a breakpoint, and when the program encounters the breakpoint marker, it pauses before executing that line of code. This allows the programmer to inspect variables, I/O status, […]
What’s the difference between NEMA and IEC motor starters?

A motor starter is a device that controls power to a motor for starting, stopping, reversing, and in some cases, protecting the motor from overload current. Although sometimes referred to as contactors, motor starters actually consist of a contactor and a thermal overload relay. The contactor is an electromechanical device based on a coil and […]
What are eddy currents and how do they affect motor performance?
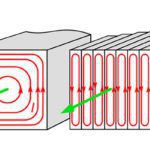
One of the electromagnetic principles that governs the operation of an electric motor is Faraday’s law, which states that when the magnetic environment of a coil of wire is changed — whether by moving the magnet and coil relative to each other or by changing the magnetic field — a voltage, or electromotive force (EMF), will […]
What are inductive encoders and how do they differ from resolvers and LVDTs?

Position measuring devices that rely on the principle of mutual induction include resolvers, linear variable differential transformers (LVDTs), and inductive encoders. Two of these technologies — resolvers and LVDTs — are based on the construction and operation of a transformer. In the case of an LVDT, voltage is applied to a primary winding and induced in […]
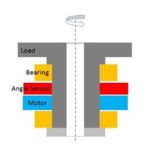
What are double- and triple-stack hybrid stepper motors ?

Of the three primary stepper motor designs — permanent magnet, variable reluctance, and hybrid — hybrid stepper motors are arguably the most popular in industrial applications, combining the best performance characteristics of permanent magnet and variable reluctance types. Hybrid stepper motors are constructed with a rotor made of two sections, or cups, with a permanent […]
What are different ways to express a gear ratio?
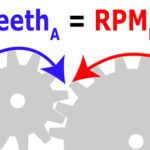
In motion control systems, gears are used to change the torque and speed delivered by a motor to a driven component. Depending on how the gears are arranged, they can either increase the delivered torque and decrease the output speed (the most common arrangement in motion control applications) or decrease the delivered torque and increase […]
Absolute encoder interfaces: Differences between SSI, BiSS, Hiperface, and EnDat
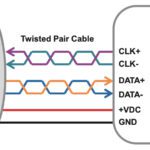
Absolute encoders can communicate with controllers through parallel or serial wiring, over a fieldbus, or via an Ethernet-based protocol such as EtherCAT. Of these options, serial communication is a simpler solution than parallel wiring (which requires a twisted pair of wires for each bit of output) and is well-suited for applications that aren’t complex enough […]
What are multi-stage gearboxes and when are they used?
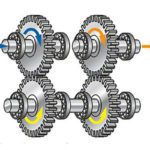
Gearboxes are commonly used in motion control applications to change the output speed and torque from a motor to a driven component. By using a smaller gear with fewer teeth (commonly referred to as a pinion) to drive a larger gear with a higher number of teeth, the torque delivered to the load is increased while […]