
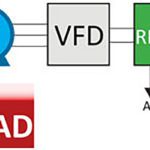
AC motors can be operated directly from AC supply voltage, but this is only suitable if the motor is required to run at constant speed. If the speed or load requirements of the motor change, an AC drive — also referred to as a variable frequency drive (VFD) — can vary the voltage and frequency […]
FAQ: What is dynamic braking and when is it used?
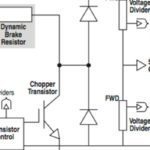
When a motor is in an overhauling condition—that is, the load is moving faster than the designated motor speed—the motor acts as a generator and produces electrical energy from mechanical energy. This electrical energy, however, needs somewhere to go, and the most common way of dealing with its release is through dynamic braking. How dynamic […]
FAQ: What are regenerative drives and where are they used?
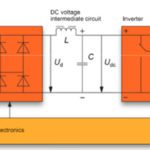
The main purpose of a motor is to convert electrical energy into mechanical energy. But when the motor’s synchronous speed is less than the rotor speed, the motor acts like a generator and converts mechanical energy into electrical energy. This energy is typically fed back into capacitors in the DC bus, but the bus can […]
FAQ: When are closed-loop and open-loop vector control useful?

AC drives have historically been controlled by a scalar method known as volts per hertz (V/Hz), in which the drive maintains a constant voltage-to-frequency ratio in order to maintain stable torque production. However, the V/Hz control scheme doesn’t allow tight speed regulation and is limited in its ability to produce torque at low speeds. Vector […]
FAQ: What is V/Hz control mode for AC drives?
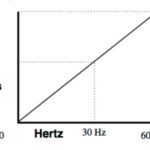
AC motors are commonly paired with variable frequency drives (VFDs), which control motor speed by regulating the frequency of the supplied voltage. Depending on the application and level of speed regulation required, VFDs can be controlled by either scalar or vector methods. The most common type of VFD control is a scalar method referred to as volts […]
FAQ: What are other options for nanopositioning besides piezo actuators?
Nanopositioning—positioning on the scale of one-billionth of a meter—is a common requirement in semiconductor and medical applications, such as metrology, scanning, dispensing, and pumping. But consistently achieving nanometer-level resolution is beyond the scope of most devices that use mechanical rolling or recirculating elements. Case in point: the most common solution for nanopositioning applications is the piezo motor […]
Lenz’s Law and Back EMF
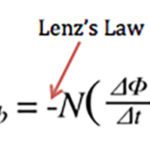
Lenz’s law and back EMF work hand-in-hand. In electric motor operation, as the armature rotates inside the magnetic field, a voltage is produced. This voltage is commonly referred to as back EMF (electromotive force), since it acts against the voltage driving the motor. Laws of electromagnetism One of the fundamental laws governing electric motor operation is […]
FAQ: How to tune servo systems for high dynamic response?
The purpose of a servo control loop is to minimize error, and this is often done through the use of PID (proportional-integral-derivative) gains, which correct errors between the target value and the actual value. But the PID algorithm is reactive, and takes time to respond. Case in point: the proportional term requires an error in order […]
Crossover frequency: How is it used in servo motor tuning?
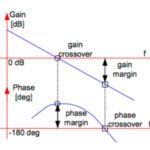
A common method for evaluating a servo system’s stability is to determine the system’s frequency response, which involves measuring the gain margin and phase margin at the crossover frequencies. To understand how gain and phase crossover frequency is used to determine stability, let’s look at exactly what it represents, using a Bode plot. Closed loop systems are difficult […]
FAQ: What are servo motor current, velocity and position loops and bandwidths?
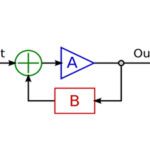
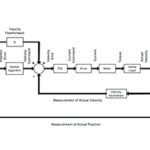
Servo motors operate in a closed-loop system, which includes a feedback device, a drive (amplifier), and a controller. The controller uses output from the feedback device to compare the commanded value (position, velocity, or torque) to the achieved value and issues commands to the drive to correct any errors. This process of monitoring feedback and […]