
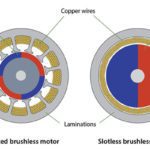
The original brushless DC (BLDC) motors were designed with slotted stators, and the majority of BLDC motors are still made this way. But this design produces cogging torque, which makes it difficult to achieve smooth motion, especially at slow speeds. To eliminate this effect, a new design was developed, eliminating the slots in the stator (which […]
Why use brushed servo motors?

The idea of brushed servo motors may seem a bit counterintuitive—most of us think of servo motors as high-performance devices used in highly dynamic applications, while brushed DC motors are low-cost solutions for mass-produced consumer devices. And, to a large extent, this is correct. But remember that “servo motor” is a fairly broad term that […]
What stepper motor type is best for high torque?
Stepper motors are commonly recognized for their holding torque, which allows them to hold a load at standstill. But for dynamic movements, it’s the motor’s pull-out torque that is important. Pull-out torque is the amount of torque that a stepper motor can produce while it is rotating, without causing it to lose steps. A stepper motor’s ability to generate […]
Why is the electrical time constant important for stepper motors?

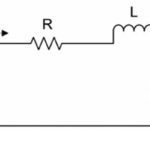
Motor windings have a property referred to as inductance, which is a resistance to any change in the electrical current through the winding. The result of inductance is the production of back EMF to oppose the change in current. Where: Eb = back EMF (volts) L = inductance (H, or Ohm-s) dI/dt = rate of […]
Why is the bandwidth of a servo control loop important?
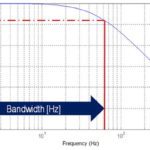
A servo drive can include any combination of three types of control loops—a position loop, a velocity loop, and a current loop. While each loop’s purpose is to control a different aspect of the motor’s performance, they are all characterized by a common parameter: bandwidth. The bandwidth, or response time, of the system is a measure […]
FAQ: What’s the difference between torque constant, back EMF constant, and motor constant?
A DC motor’s output torque is directly proportional to the current through the windings, and the motor’s angular speed is directly proportional to the back EMF that it generates. These simple relationships are typically given by the equations: Where: T = torque (Nm) I = current (A) kT = torque constant (Nm/A) And Where: ω = […]
FAQ: How are PID parameters configured for variable frequency drives?
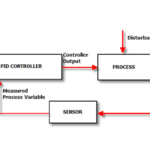
Using proportional-integral-derivative (PID) control with variable frequency drives (VFDs) is common when a process set point—such as temperature, pressure, flow, or speed—needs to be precisely controlled. In fact, many VFDs are now supplied with an integrated PID controller. PID controller terms Configuring the PID parameters for fast response and minimum overshoot (referred to as tuning […]
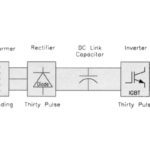
What are low voltage AC drives and why should you use them?
Despite the benefits of using medium voltage AC drives for high horsepower motors, low voltage technology holds a dominant place in the AC drive market, for both low- and high-power applications. There are multiple reasons for this, not the least of which are cost and availability. Medium voltage drives have historically been custom-engineered solutions, with low-volume production, […]
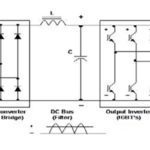
FAQ: What are medium voltage AC drives, and where are they used?
Recall that the basic equation for electric power is P = VI, or, power = voltage multiplied by current. This means that for a given power level, voltage and current are inversely proportional. In other words, the higher the supply voltage, the lower the current draw will be. For AC motors that are used in high-power applications, […]
The Torque Equation and the Relationship with DC Motors
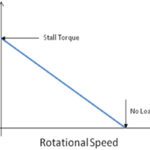
Understanding the torque equation and the relationship between speed and torque is an important part of selecting and operating a DC motor. DC motors are relatively simple machines: when the load on the motor is constant, speed is proportional to supply voltage. And when supply voltage is constant, speed is inversely proportional to the load […]